Created by Tymofii Shchetilin
Pro vektorový prostor V platí:
(1) Nechť x_1, . . . , x_m jsou lineárně nezávislé. Pak m ≤ dim V . Pokud m = dim V , potom x_1, . . . , x_m je báze
(2) Nechť y_1, . . . , y_n jsou generátory V . Pak n ≥ dim V . Pokud n = dim V , potom y_1, . . . , y_n je báze.
Dimenze konečně generovaného vektorového prostoru je velikost nějaké jeho báze. Dimenze prostoru, který není konečně generovaný, je ∞.
Buď V vektorový prostor nad T, a mějme v1, . . . , v_n ∈ V . Pak vektory v1, . . . , v_n jsou lineárně závislé právě tehdy, když existuje k ∈ {1, . . . , n} takové, že
span{v1, . . . , vn} = span{v1, . . . , vk−1, vk+1, . . . , vn}
Nechť B = {v_1, . . . , v_n} je báze prostoru V a nechť vektor u ∈ V má vyjádření u = P_n i=1 α_i*v_i . Pak souřadnicemi vektoru u ∈ V vzhledem k bázi B rozumíme koeficienty α_1, . . . , α_n a vektor souřadnic značíme [u]B := (α_1, . . . , α_n)^T
Nechť v_1, . . . , v_n je báze prostoru V . Pak pro každý vektor u ∈ V existují jednoznačně určené koeficienty α_1, . . . , α_n ∈ T takové, že u = P_n i=1 α_i*v_i .
Buď V vektorový prostor nad T. Pak bází rozumíme jakýkoli lineárně nezávislý systém generátorů V .
Abelova (komutativní) grupa je taková grupa, která navíc splňuje: (4) ∀a, b ∈ G a ◦ b = b ◦ a (komutativita)
Podgrupa grupy (G, ◦) je grupa (H, ⋄) taková, že H ⊆ G a pro všechna a, b ∈ H platí a ◦ b = a ⋄ b. Značení: (H, ⋄) ≤ (G, ◦).
A musí být uzavřená!
1. Násobení skalárem
2. Součet vektorů
Proč to platí?
Buď p ∈ Sn a buď t = (i, j) transpozice. Pak sgn(p) = − sgn(t ◦ p) = − sgn(p ◦ t).
Buďte U, V podprostory vektorového prostoru W. Pak platí
dim(U + V ) + dim(U ∩ V ) = dim U + dim V
Buďte U, V podprostory vektorového prostoru W. Pak spojení podprostorů U, V je definováno jako U + V := {u + v; u ∈ U, v ∈ V }.
Věta: Buďte U, V podprostory vektorového prostoru W. Pak U + V = span(U ∪ V ).
Těleso je množina T spolu se dvěma komutativními binárními operacemi + a · splňující
(1) (T, +) je Abelova grupa, neutrální prvek značíme 0 a inverzní k a pak −a,
(2) (T \ {0}, ·) je Abelova grupa, neutrální prvek značíme 1 a inverzní k a pak a −1 ,
(3) ∀a, b, c ∈ T: a(b + c) = ab + ac
Podmínky
(1) ∀a, b, c ∈ G : a ◦ (b ◦ c) = (a ◦ b) ◦ c (asociativita)
(2) ∃e ∈ G ∀a ∈ G : e ◦ a = a ◦ e = a (existence neutrálního prvku),
(3) ∀a ∈ G ∃b ∈ G : a ◦ b = b ◦ a = e (existence inverzního prvku).
(4*) Uzavřenost
Důsledek 1. Platí sgn(p) = (−1)r , kde r je počet transpozic při rozkladu p na transpozice.
Důsledek 2. Buď p, q ∈ Sn. Pak sgn(p ◦ q) = sgn(p) sgn(q).
Důsledek 3. Buď p ∈ Sn. Pak sgn(p) = sgn(p −1 ).
*Skládání permutací není komutativní
sgn(p) = (−1)^(n−k)
Buď A ∈ T m×n a buď A^R její RREF tvar s pivoty na pozicích (1, p1), . . . ,(r, pr), kde r = rank(A). Pak
(1) nenulové řádky A^R, tedy vektory A^R_1∗ , . . . , A^R_r∗ , tvoří bázi R(A),
(2) sloupce A∗p1 , . . . , A∗pr tvoří bázi S(A),
(3) dim R(A) = dim S(A) = r
Sloupcový prostor S(A) := span{A_(∗1), . . . , A_(∗n)}
Řádkový prostor R(A) := S(AT )
Věta 7.5. Množina řešení soustavy rovnic Ax = b je prázdná nebo afinní. Je-li neprázdná, můžeme tuto množinu řešení vyjádřit ve tvaru Ker(A) + x0, kde x0 je jedno libovolné řešení soustavy.
Důkaz. Pokud x1 je řešením, pak lze psát x1 = x1 −x0 +x0. Stačí ukázat, že x1 −x0 ∈ Ker(A). Dosazením A(x1 − x0) = Ax1 − Ax0 = b − b = 0. Tedy x1 ∈ Ker(A) + x0. Naopak, je-li x2 ∈ Ker(A), pak x2 + x0 je řešením soustavy, neboť A(x2 + x0) = Ax2 + Ax0 = 0 + b = b.
Buď V vektorový prostor nad T.
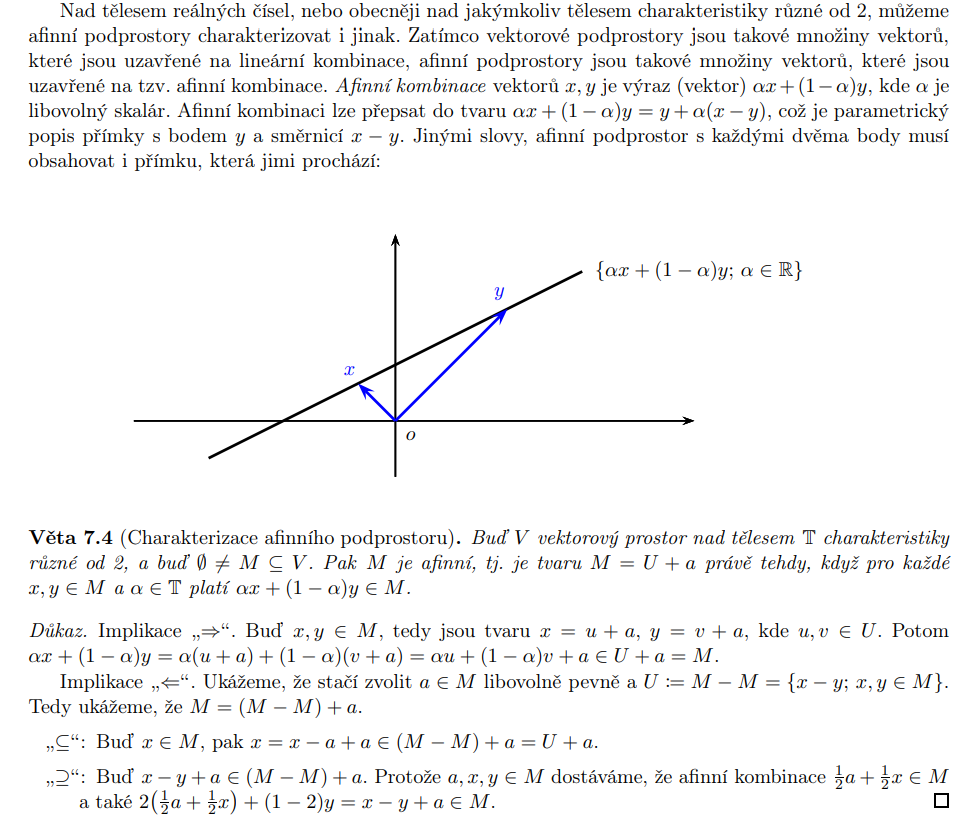
Pak afinní podprostor je jakákoli množina M ⊆ V tvaru
M = U + a = {v + a; v ∈ U},
kde a ∈ V a U je vektorový podprostor V .
Soustava (A | b) má (aspoň jedno) řešení právě tehdy, když rank(A) = rank(A | b)
*Soustava Ax = 0 s nulovou pravou stranou se nazývá homogenní
Ekv. tvrzení:
1. A je regulární
2. pro nějaké b ∈ R^n má soustava Ax = b jediné řešení
3. pro každé b ∈ R^n má soustava Ax = b jediné řešení
Ker(A) := {x ∈ T^n ; Ax = o}
*Věta o existenci inverzní matice
*Věta o jednoznačnosti
Buď M = U + a afinní podprostor a B = {v1, . . . , vn} báze U.
Pak každé x ∈ M se dá jednoznačně zapsat ve tvaru x = a + Pn i=1 α_i*v_i . Tedy S = {a, v_1, . . . , v_n} lze považovat za souřadný systém a vektor [x]_S := [x − a]_B = (α_1, . . . , α_n) T za příslušné souřadnice.
Buď g : U → V lineární zobrazení a mějme pevný vektor b ∈ V .
Potom afinní zobrazení má tvar f(u) = g(u) + b.
Jednoduchým příkladem afinního zobrazení je posunutí, tedy zobrazení g : V → V s popisem f(x) = x + b, kde b ∈ V je pevné.
Vektory x0, x1, . . . , xn vektorového prostoru jsou afinně nezávislé, pokud x1 − x0, . . . , xn − x0 jsou lineárně nezávislé. V opačném případě vektory nazýváme afinně závislé.
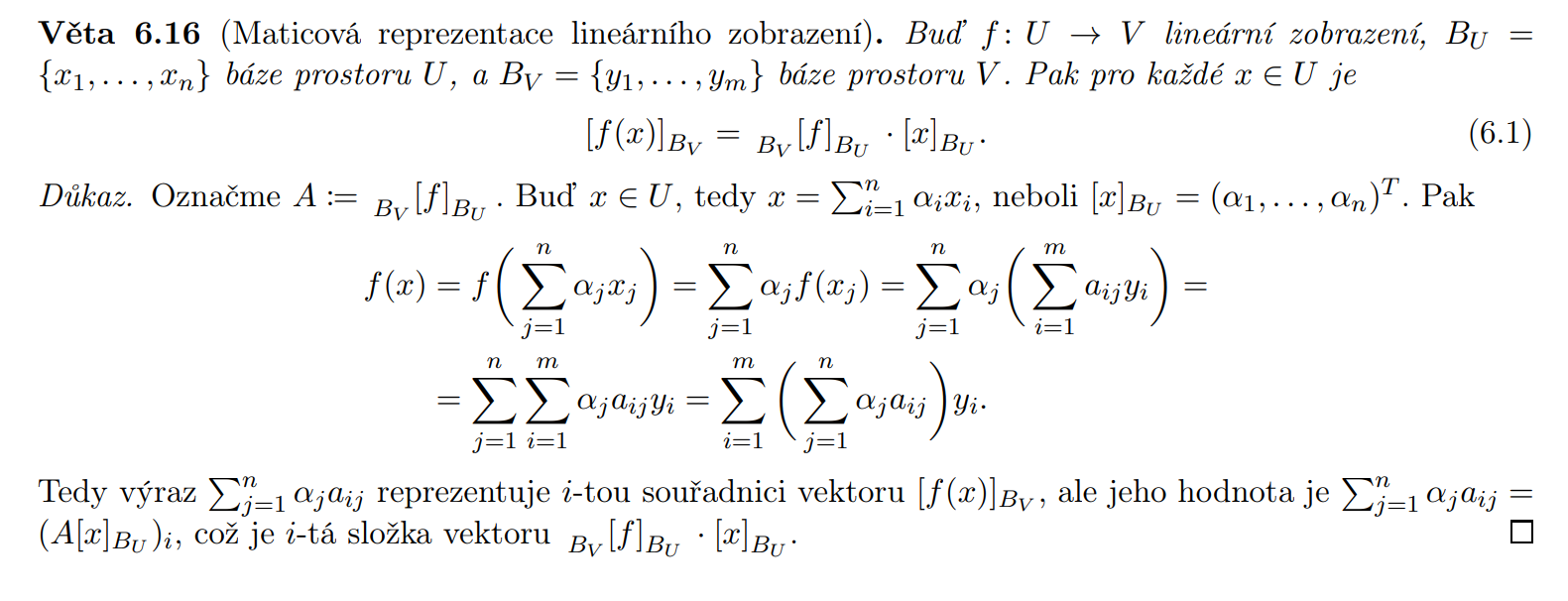
6.18. Buď f : U → V lineární zobrazení, B_U báze prostoru U, a B_V báze prostoru V . Pak jediná matice A splňující (6.1) je A = B_V_[f]_B_U .
Buď f : U → V lineární zobrazení. Pak: (1) f(U) je podprostorem V , (2) Ker(f) je podprostorem U, (3) pro každé x1, . . . , xn ∈ U platí: f(span{x1, . . . , xn}) = span{f(x1), . . . , f(xn)}.
Buď f : U → V lineární zobrazení. Pak
(1) f( Pn i=1 αixi) = Pn i=1 αif(xi) pro každé αi ∈ T, xi ∈ U, i = 1, . . . , n,
(2) f(o) = o.
Buď f : U → V lineární zobrazení, B_U = {x1, . . . , xn} báze prostoru U nad T, a B_V = {y1, . . . , ym} báze prostoru V nad T. Nechť f(x_j) = P_m i=1 a_{ij}*y_i . Potom matice A ∈ T^{m×n} s prvky a_{ij} , i = 1, . . . , m, j = 1, . . . , n, se nazývá matice lineárního zobrazení f vzhledem k bázím B_U , B_V a značí se B_V_[f]_B_U .
Pro každou matici A ∈ T^(m×n) platí rank(A) = rank(A^T)
Buďte U, V vektorové prostory nad tělesem T. Zobrazení f : U → V je lineární, pokud pro každé x, y ∈ U a α ∈ T platí:
• f(x + y) = f(x) + f(y),
• f(αx) = αf(x).
Isomorfismus mezi prostory U, V nad tělesem T je vzájemně jednoznačné lineární zobrazení f : U → V . Pokud mezi prostory U, V existuje isomorfismus, pak říkáme, že U, V jsou isomorfní.
(1) Je-li f : U → V isomorfismus, pak f −1 : V → U existuje a je to také isomorfismus.
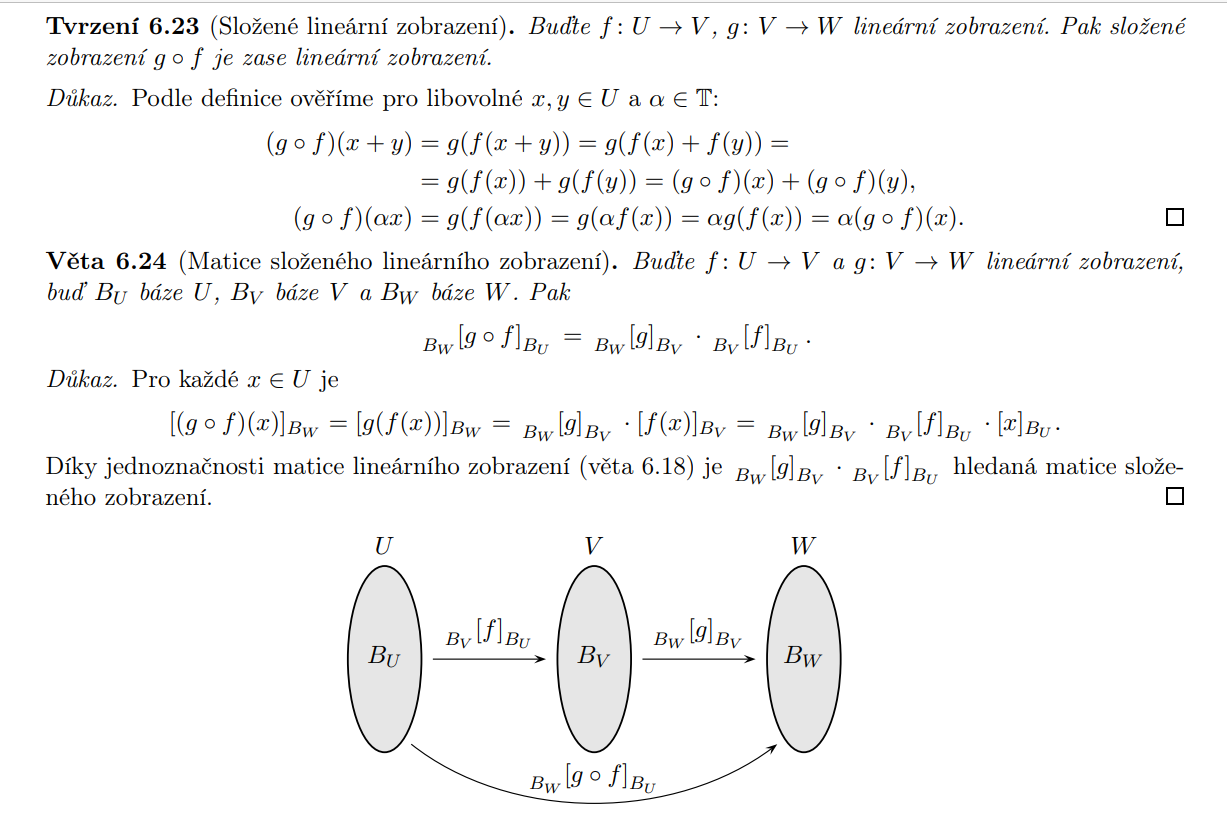
(2) Jsou-li f : U → V a g : V → W isomorfismy, pak g ◦ f : U → W je také isomorfismus.
(3) Je-li f : U → V isomorfismus, pak libovolná báze prostoru U se zobrazuje na bázi prostoru V .
(4) Je-li f : U → V isomorfismus, pak dim U = dim V .
(1) f je prosté,
(2) Ker(f) = {o},
(3) obraz libovolné lineárně nezávislé množiny je lineárně nezávislá množina.
Všechny n-dimenzionální vektorové prostory nadtělesem T jsou navzájem isomorfn
Buďte U, V prostory nad T a x1, . . . , xn báze U. Pak pro libovolné vektory y1, . . . , yn ∈ V existuje právě jedno lineární zobrazení takové, že f(xi) = yi , i = 1, . . . , n.
(6.35) Buď V vektorový prostor nad tělesem T dimenze n s bází B. Pak zobrazení x 7→ [x]_B je isomorfismus mezi prostory V a T^n nad T.
Buď f : U → V lineární zobrazení, U, V prostory nad T, BU bázeprostoru U a BV báze prostoru V . Označme A = BV[f]BU. Pak:
(1) dim Ker(f) = dim Ker(A),
(2) dim f(U) = dim S(A) = rank(A).
Buď f : U → V lineární zobrazení, pak dim U = dim Ker(f) + dim f(U).